
In this article, we’ll explore the fundamentals of ESCs (Electronic Speed Controllers) and their role in FPV drones. This comprehensive guide aims to provide useful information on voltage ratings, current ratings, different ESC types, and the anatomy of an ESC. I will also share a few ESC recommendations on what to buy.


What is an ESC?
An ESC, short for Electronic Speed Controller, is responsible for controlling the speed of the motors in an FPV drone. The ESC receives throttle commands from the flight controller and drives the brushless motors at the desired speed.
It is important to use high-quality ESCs if you want a reliable and smooth flight experience, although many other factors also play a role in overall performance which we will explain in this guide.
ESC Recommendations

While you can buy the ESC on its own, I highly recommend getting a complete FC/ESC stack, because it greatly simplifies the building process and complexity thanks to its plug-and-play nature. If you are getting the ESC and FC from different manufacturers, the connector pinouts are often different, which means you have to cross-check the wiring and re-pin the connector manually. That can be confusing and time-consuming, especially for beginners.

If you are looking for an FC/ESC stack, check out my recommendations here: https://oscarliang.com/flight-controller/.
If you still prefer buying the ESC separately, here are my recommendations.
Just note that when using a 4-in-1 ESC and flight controller from different brands, it is crucial to verify the pinout before connecting them, to avoid damaging the components. Always inspect the wiring harness carefully and adjust the wires as needed before plugging it in.
Lumenier ELITE PRO 60A

Product Page:
Key Specs:
- AM32 Firmware
- 2S-6S Input Voltage
- Supports DShot Protocols
- Dual heatsinks for Improved Cooling
- Dimensions: 43 x 46 x 9 mm (including heatsink)
- Mounting Holes: 30.5 x 30.5 mm
- Constant Current: 60 Amps
- Burst Current: 100 Amps
- Weight: 27 g
XRotor Micro 65A/45A
Racers’ Favourite

Product Page
Key Specs:
- AM32 Firmware
- 3S-6S Input Voltage
- Supports DShot Protocols
- Mounting Holes: 30.5 x 30.5 mm
- Constant Current: 65A
- Burst Current: 80A
- Weight: 15 g
If you need the 20x20mm form factor, get the XRotor G2 45A ESC here:
The Hobbywing XRotor G2 45A/65A are some of the most recognizable 4in1 ESCs in the industry, endorsed by many top racing pilots. This feature-rich ESC offers DShot and dynamic 120kHz PWM frequency support, robust FETs, pin holes for soldering a low ESR capacitor, and the option to use either a connector for a plug-and-play setup or direct soldering to the flight controller. The latest batches have mitegrated from BLHeli32 to AM32 firmware, ensuring future development support. If budget isn’t a concern, this ESC is a strong contender. Read more here: https://oscarliang.com/hobbywing-xrotor-g2-4in1-esc-45a-65a/.
T-Hobby V70A ESC
Cheapest Worth Having

Product Page:
You can get this ESC together with a flight controller for under $90, which is one of the most affordable stacks you can get right now. I’ve personally tested this ESC and have been flying it for sometime now, it’s still going strong and performing well. I recommend getting the whole stack so you get the maximum discount. Together, they cost just under $70, making it one of the best value stacks available in 2024. For more details, see my review: https://oscarliang.com/t-hobby-f7-se-fc-v70a-esc-stack/
Aikon AK32PRO 50A V2
Reliable 20x20mm ESC

Product Page:
20x20mm ESCs are smaller and lighter but not as reliable as 30x30mm ESCs due to the larger MOSFETs on the latter. Additionally, soldering is easier on 30x30mm ESCs thanks to larger solder pads. Choose 30x30mm ESCs whenever possible; however, for lightweight racing drones or smaller drones, 20x20mm is a popular option.
Despite their compact form factor, these Aikon ESCs offer performance similar to some 30x30mm boards, with a 50A current rating per motor output and support for up to 6S. They’re small enough to fit in 3″ builds. If you ever need a 20x20mm 4-in-1 ESC for even a lightweight 5″ build, this is an excellent choice as well.
Aikon AK32 35A ESC
Reliable Single ESC

Product Page:
While I personally prefer 4in1 ESCs due to their ease of use, you may have reasons to choose individual ESCs. In that case, I recommend the AK32 35A ESC by Aikon. I’ve used these ESCs on a build for a couple of years without any issues, and they offer excellent reliability and performance.
ESC Types
In FPV drones, there are two main types of ESC: Single ESCs and 4-in-1 ESCs.
Single ESC

Single ESC controls only one motor, so you would need 4 of them in a quadcopter that has 4 motors. They were the standard in earlier drone builds but have largely fallen out of favor in recent years, with 4-in-1 ESCs now dominating the market due to their simplicity and space efficiency.
Advantages of Single ESCs:
- Easy to replace individually: If one ESC is damaged, it can be swapped out individually without affecting the others—this used to be a cost-effective advantage.
- Better for non-standard multirotors: They offer flexibility in custom builds with more or fewer than four motors.
- Thermal separation: Since each ESC is placed independently, heat buildup is less of an issue compared to a compact 4-in-1 board. However, heat management has become less significant over time. Modern 4in1 ESCs are highly reliable, and failures are much less frequent.

Disadvantages of Single ESCs:
- More soldering and wiring: Each ESC requires separate power and signal connections, leading to more complex wiring.
- Heavier setup: The additional wires and external power distribution board (PDB) increase weight.
- Increased moment of inertia: Since ESCs are mounted away from the drone’s center, they contribute to rotational inertia, which can slightly reduce agility and responsiveness.
Single ESCs typically require connection to a PDB or a flight controller with integrated power distribution. But due to the wiring complexity, extra weight, and compact design trends, they are rarely used in modern FPV drones. In most builds today, single ESCs and PDBs have been almost completely replaced by 4in1 ESCs.
4in1 ESC
A 4-in-1 ESC integrates four individual ESCs onto a single circuit board, with each ESC controlling one motor, so a 4in1 ESC can control up to 4 motors. This design has become the standard in modern FPV drones due to its simplicity, compactness, and performance.
Typically, a 4-in-1 ESC shares the same footprint as the flight controller (FC), which allows for clean stacking and easy installation. These two boards are usually mounted on top of each other and connected via a wire harness, significantly reducing soldering work and simplifying the build process.

Advantages of 4-in-1 ESCs:
- Simplified wiring: Fewer solder joints and cleaner layouts compared to using four separate ESCs.
- Space-saving: Fits neatly in modern frames, allowing for compact and organized builds.
- Centralized mass: Having all ESCs at the center of the drone improves weight distribution and enhances responsiveness.
- Highly reliable: Modern 4-in-1 ESCs are very dependable, so the risk of a single ESC failure is low.
Trade-offs:
- If one ESC fails, you’ll need to replace the entire board, which can be costly. However, this is rare with today’s high-quality ESCs, especially from reputable brands.
Common Mounting Patterns and Sizes of 4in1 ESC:
- 30×30mm – Ideal for 5″ and larger drones. These boards typically have larger FETs, offering better durability and higher current handling.
- 20×20mm – Suited for 3″ to 4″ micro drones. They are lighter but may have lower current ratings.
There’s also a growing trend of integrated all-in-one (AIO) boards, where the 4-in-1 ESC and flight controller are combined into a single board with a 25.5×25.5mm mounting pattern. These are ideal for sub-250g builds, cinewhoops, and ultralight “toothpick” drones, where space and weight savings are crucial and power demands are lower.
How to Choose ESC?
To select the appropriate ESC for your FPV drone, ensure you understand the requirements: the ESC should be compatible with your battery’s voltage and should handle the current draw of your chosen motor and propeller combo at 100% throttle.
Voltage Ratings

Verify that your ESCs support the voltage of your battery. Using a battery voltage that’s too high for your ESC can cause damage. The majority of the ESCs these days support input voltages from a 6S LiPo battery, while some only support up to 4S (or even lower). The terms 6S and 4S refer to the cell count in your LiPo battery. If you’re unfamiliar with these terms, please refer to my LiPo battery beginner guide: https://oscarliang.com/lipo-battery-guide/#Cell-Count.
Current Ratings

The ESC current rating (or “amp rating”) indicates the maximum current an ESC can handle without damage. Keep in mind that this is NOT the amount of current pushed to the motors, it’s just a limit, so don’t worry about it being “too large”. An amp rating can never be too high, only too low.
For the typical FPV drone pilot, the current rating on most ESCs is more than sufficient. If you are building a specialized racing drone that requires extreme performance or high-speed runs, you will need to pay close attention to the ESC amp rating, along with other factors. However, under normal use, most pilots do not push their batteries hard enough to exceed the current rating of their ESCs.
There are two current ratings for an ESC: continuous and burst. The continuous current rating signifies the constant current the ESC can safely manage, while the burst current rating represents the maximum current the ESC can handle for short periods, typically less than 10 seconds.
Understanding Battery Limitations
I will try to explain why I said you don’t have to worry about current ratings in most cases.
For instance, here’s a 60A 4in1 ESC (continuous current rating).

The 60A rating is for each motor, which means this 4in1 ESC is able to handle a total current of up to 240A total (assuming each motor draws equal amps at 100% throttle). If you’re only pulling 100A in total, each motor is only drawing around 25A, well within the amp limit of 55A. In fact, pulling 100A is a significant load for a 5″ FPV drone, and it’s close to the limit of most existing LiPo batteries, which means they won’t sustain such high current draw long enough to actually damage your ESC. Additionally, the ESC’s burst limit is typically higher than its continuous current limit, allowing a 55A-rated ESC to handle bursts of 70A or even 80A for a few seconds. For this reason, choosing one of the recommended ESCs on our page should suffice for most 5″ FPV drones without much concern.
Durability and Weight Considerations
Modern ESCs are often marketed with higher amp ratings to indicate increased durability and resistance to voltage spikes. Although your drone may not require 50A or 60A during normal use, a higher-rated ESC may still be desirable for its increased robustness. Lower-rated ESCs, such as 30A ones, may be more susceptible to damage during crashes, despite being adequate for typical use. However, beware of the increased weight. If you are building a lightweight drone, you probably want to avoid going overboard.
ESC Firmware

In this section, I will provide an overview of the most popular ESC firmware. For a complete and up-to-date list of ESC firmware, visit: https://oscarliang.com/esc-firmware-protocols/
SimonK and BLHeli
Two of the oldest open-source ESC firmware for multirotors are SimonK and BLHeli. These are now obsolete and no longer used in modern ESCs, but they deserve an honorable mention for laying the foundation for FPV drones.
BLHeli_S and Bluejay
BLHeli_S firmware is the second generation of the BLHeli firmware, developed specifically for ESCs with faster 8-bit “Busybee” processors. This post explains how to connect, flash, and configure BLHeli_S ESCs: https://oscarliang.com/connect-flash-blheli-s-esc/
While the official BLHeli_S firmware is no longer being updated (as development focus shifted to the newer BLHeli_32), custom firmware has emerged to support hardware that comes with BLHeli_S, offering cutting-edge features and performance comparable to the latest and more expensive BLHeli_32 ESCs. A notable example is Bluejay, and I highly recommend flashing your BLHeli_S ESC to Bluejay for optimal performance. Here’s a comprehensive tutorial on how to flash Bluejay: https://oscarliang.com/bluejay-blheli-s/
BLHeli_32
BLHeli_32 ESC firmware is the third and most recent generation of BLHeli. Designed specifically for 32-bit processor, it has become closed-source in this iteration. While BLHeli_32 ESC offers certain advantages and unique features to the older BLHeli_S, it is considerably more expensive and does not offer significant improvement in performance, therefore many pilots still prefer buying the cheaper BLHeli_S ESC and flash them to Bluejay.
User guides:
Note that BLHeli32 is no longer in development, so you probably want to choose open source firmware that is actively maintained by the community, such as AM32 or Bluejay.
More details: https://oscarliang.com/end-of-blheli_32/.
AM32
AM32 is a relatively new open-source firmware that competes with BLHeli_32. Some new ESCs are already shipped with AM32 firmware. There are pros and cons to AM32 and BLHeli_32, which you can learn about here: https://oscarliang.com/am32-esc-firmware-an-open-source-alternative-to-blheli32/.
Which ESC Firmware Should You Choose?
The performance difference between BLHeli_S ESC (flashed with Bluejay) and AM32 ESC is minimal, so you can’t go wrong with either option. Both firmware now support Bi-directional DShot, which means you can enable RPM filtering in Betaflight with either type of ESC.
ESC Protocols

Oneshot protocol
ESC protocols determine the speed of the motor signal between the FC (flight controller) and the ESC. Here is a list of ESC protocols commonly used in FPV drones, arranged from the oldest to the most recent:
Without delving too deep into technicalities, just know that DShot is currently the standard ESC protocol in FPV drones. You should always use DShot in Betaflight for optimal performance.
DShot has various speeds, indicated by the number at the end of the names. The speed you should choose depends on the PID Loop Frequency set in Betaflight.
- For 2KHz/1.6KHz, use DShot150.
- For 4KHz/3.2KHz, use DShot300.
- For 8KHz, use DShot600.
How to Connect ESC?
An ESC is powered directly from a LiPo battery, and the motor speed is controlled by a signal from the flight controller.
The motors are connected to the ESC through 3 wires. Swapping any 2 of the 3 wires will simply reverse the motor direction. You can also reverse motor rotation in the ESC settings, that’s why the order in which you connect the motor wires to the ESC doesn’t really matter. I have a step-by-step guide on how to reverse motor direction here: https://oscarliang.com/change-motor-spin-direction-quadcopter/.
Single ESC Wiring to FC and motor.

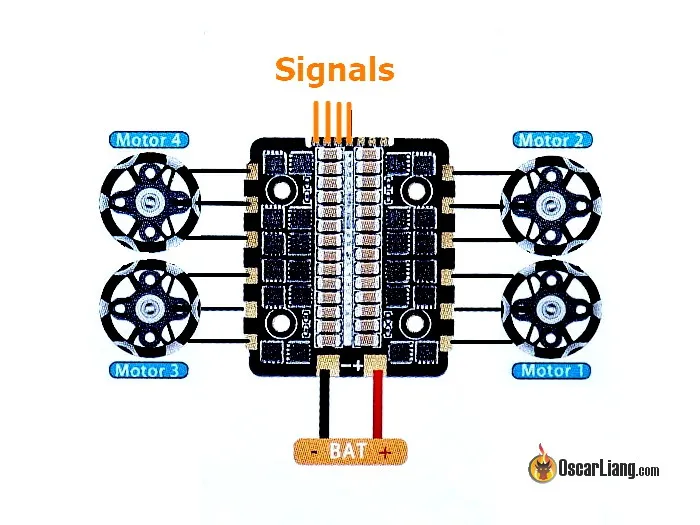
4in1 ESC Wiring to FC and motors:

Often, you will see a large number of capacitors on an ESC board. These are for noise filtering generated by the motors and FETs. However, regardless of the amount of filtration available on the ESC, you should always solder an additional capacitor to the power pads of your ESC. This will reduce the noise in your power system, improving FPV feed and flight performance. I explain why and which capacitors you should use in this guide: https://oscarliang.com/capacitors-mini-quad/.
ESC Anatomy
Now that we’ve covered ESC types, software, and requirements, let’s discuss the anatomy and components of an ESC. The essential components on an ESC are:
- Microcontroller unit (MCU)
- Gate driver
- MOSFET
- Low dropout voltage regulator (LDO)
- Current sensor
- Filtering capacitors
These components work together to control the speed of the motor and ensure efficient operation. I will explain what these components do in more detail below.

A 4in1 ESC basically has four ESCs integrated on the same piece of PCB. These ESCs might share the same components (such as the processor, filtering capacitors, voltage regulators, etc.), making the 4in1 ESC smaller, lighter, and overall more cost-efficient.

LDO
A low dropout voltage regulator, or LDO, is a voltage regulator used for converting battery voltage down to an acceptable level to power the microcontroller and other components.
Micro Controller
The microcontroller, MCU, or processor is the brain of an ESC, and it’s also where the ESC firmware is stored.
Gate Driver
Gate drivers are used to drive the MOSFETs in our ESC. They’re connected to the gate of a MOSFET, hence the name “gate driver.” Older ESCs use simple transistors to drive the MOSFETs. Using dedicated gate drivers improves active braking effectiveness. Instead of having separate gate drivers for the three motor phases, modern BLHeli_32 ESCs use the FD6288 IC chip by Fortior. One of these chips contains three independent MOSFET gate drivers in a single chip.
MOSFET
MOSFETs are like switches; they switch the power on and off thousands of times per second, which is how the motors are driven. Bigger MOSFETs usually mean the ESC can handle higher voltage and current, making the ESC more robust and capable of withstanding abuse. MOSFET size is especially important for high voltage rigs, such as 6S, due to the higher voltage spikes.
I have a tutorial explaining how MOSFET work: https://oscarliang.com/how-to-use-mosfet-beginner-tutorial/
Current Sensor
The current sensor measures the current that goes through the ESC and sends that information to the flight controller. This is helpful as you can display the drone’s current draw on screen in real time and see how much battery capacity has been consumed.
ESC Processor
Multirotor ESCs on the market primarily use microcontroller from ATMEL, Silabs, and ARM Cortex. Each type of MCU has unique specifications, features, and firmware support:
- ATMEL 8-bit: Compatible with both SimonK and BLHeli ESC firmware
- SILABS 8-bit: Supported by BLHeli or BLHeli_S
- ARM Cortex 32-bit (e.g., STM32 F0, F3, L4): Can run BLHeli_32
ATMEL 8-bit ESCs running SimonK were more common until Silabs-based ESCs gained popularity due to the rise of BLHeli_S. In 2016, 32-bit ARM Core MCUs were introduced to ESCs, running BLHeli_32 firmware.
BLHeli_32 ESC Processors
BLHeli_32 ESCs use STM32 processors, similar to those found in flight controllers. The common processors used in ESCs are F0, F3, and F4.
Manufacturers started using more powerful F3 and F4 MCUs on BLHeli_32 ESCs since 2021, primarily due to the global chip shortage, not for their processing power. These more powerful ESCs don’t offer significant benefits over the original BLHeli_32 ESCs based on the F0 processor or older BLHeli_S ESCs (non-STM32 MCUs). The high PWM frequency (e.g., 128kHz) offered by these faster processors is mainly useful for certain type of FPV drones, for instances, cinematic flying and micro drones, where smoother motors and better efficiency are desired. This high PWM frequency doesn’t provide optimal acceleration and torque at low RPM for powerful and fast FPV drones.
To take full advantage of “variable PWM frequency by RPM” feature in BLHeli_32, smaller aircraft can benefit from the higher PWM frequency of the faster F4 processor (up to 128KHz) because they typically have much higher RPM and higher-frequency harmonics. For larger drones, such as 5″, the RPM is lower, and 96KHz or even 48KHz should suffice, making higher PWM frequency less important.
SILABS F330 and F39X Processors

DYS XM20A – F390
These processors are used in BLHeli_S ESCs.
SiLabs-based ESCs feature various processors with different performance levels, such as the F330 and F39X (F390/F396).
The F330 has a lower clock speed than the F39X and may struggle with high KV motors. The F39X doesn’t have these issues and supports Multishot ESC protocol and Oneshot42 seamlessly. Well-known examples include the Littlebee 20A (F330) and DYS XM20A (F39X).
Busybee (EFM8BB) Processors

Aikon SEFM 20A – BusyBee
These are BLHeli_S ESC Processors.
Busybee MCUs are an upgrade to the F330 and F39X. If you currently have a BLHeli_S ESC, it probably uses a BusyBee chip. There are a few BusyBee chips:
- BB1 – EFM8BB10F8
- BB2 – EFM8BB21F16
- BB51 – EFMBB51F16
Rather than using software PWM (pulse width modulation), Busybee MCUs have dedicated hardware for generating a PWM signal synced with the processor’s duty cycle, resulting in smoother throttle response. They also support DShot ESC Protocol, making them a cost-effective and efficient solution for today’s standards
Examples of ESCs that use these MCUs include the Aikon SEFM 30A and DYS XS30A.
The overall performance ratings within 8-bit processors are (from the best to the worst): BB5/BB2 > BB1 > F39X > F330 > Atmel-8-bit.
How Does ESC Work?
The ESC controls the motor by alternating currents to the motor’s stator poles in a specific sequence, creating a magnetic field that pushes and pulls on the motor’s magnets, causing it to spin. This process is called commutation, and it must be precisely timed.
User can adjust the timing to fine tune the performance of their drone, it’s called motor timing in the ESC settings.
For the motor to spin correctly, the ESC’s timing must align perfectly with the motor’s rotational speed and position. Any disruption in this timing can cause a desync, where the ESC and motor lose “communication,” leading the motor to stutter or stop completely. This is called ESC desync: https://oscarliang.com/fix-esc-desync/.
Conclusion
Armed with the essential information about ESC types, electrical ratings, protocols, and anatomy, you’re well-prepared to select the perfect ESC for your FPV drone build. Keep in mind that the majority of the latest ESCs on the market perform at a similar level, making it challenging to go wrong with any of the options mentioned in this tutorial. Focus on understanding your specific needs and preferences to find the best match for your build.
Edit History
- 2016 – Article created
- 2017 – updated article with info about BLHeli_32 and 32-bit processors
- 2020 – Updated info, added ESC anatomy and connection diagrams, Added info about BLHeli_32 ESC processor
- 2023 – Tutorial revised, updated ESC recommendations
- May 2024 – Updated guide and product links
- Jun 2026 – Updated guide and product links


{kind=link}